
Harvard GSD Projects
Projects completed at the Harvard Graduate School of Design, Masters in Design Technology program.
Intro to Computational Design
Professor: Panagiotis Michalatos
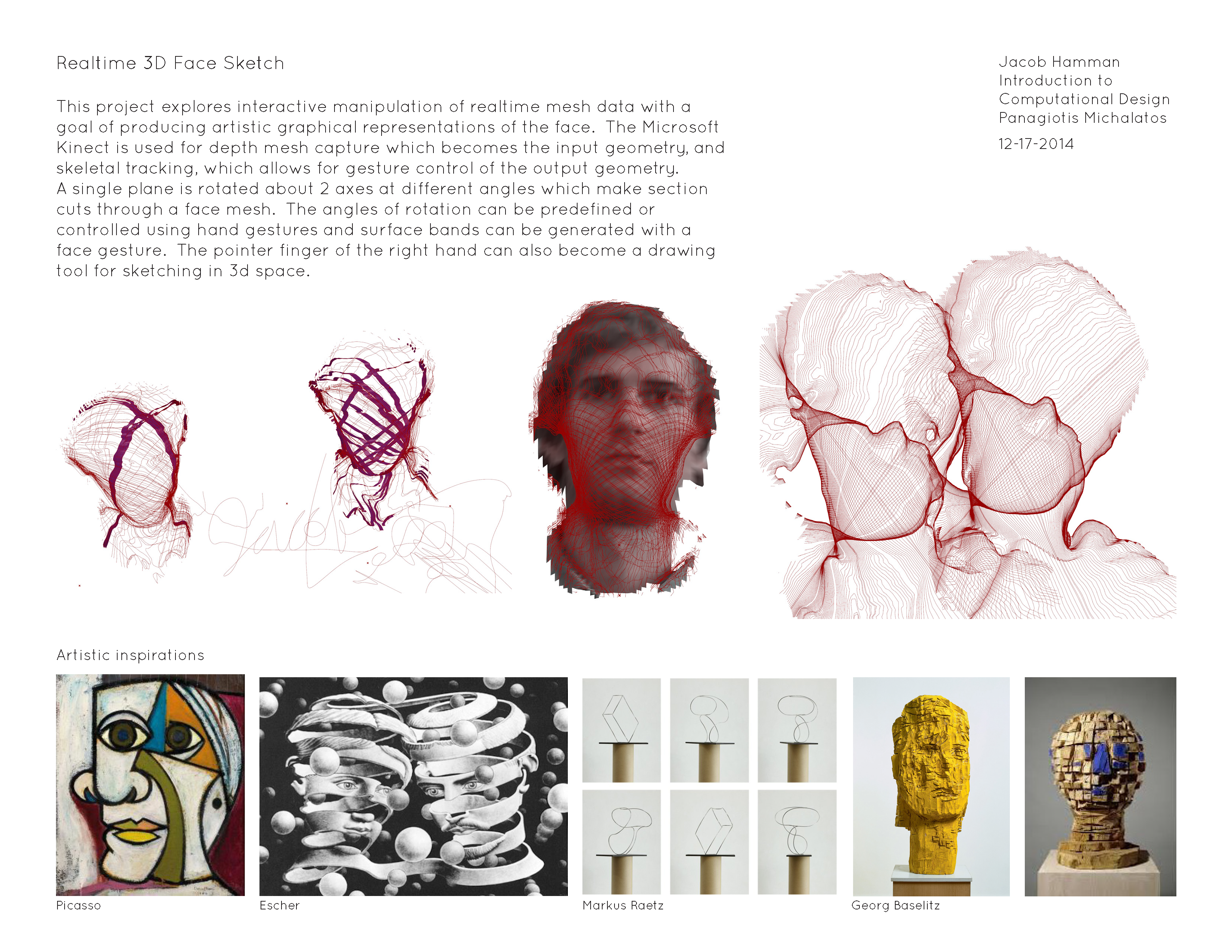
Realtime 3D Face Sketch
This project explores interactive manipulation of realtime mesh data with the goal of producing
artistic graphical representations of the face. The Microsoft Kinect is used for depth mesh capture which becomes the
input geometry, and skeletal tracking, which allows for gesture control of the output geometry.
Project Description
and inspiration
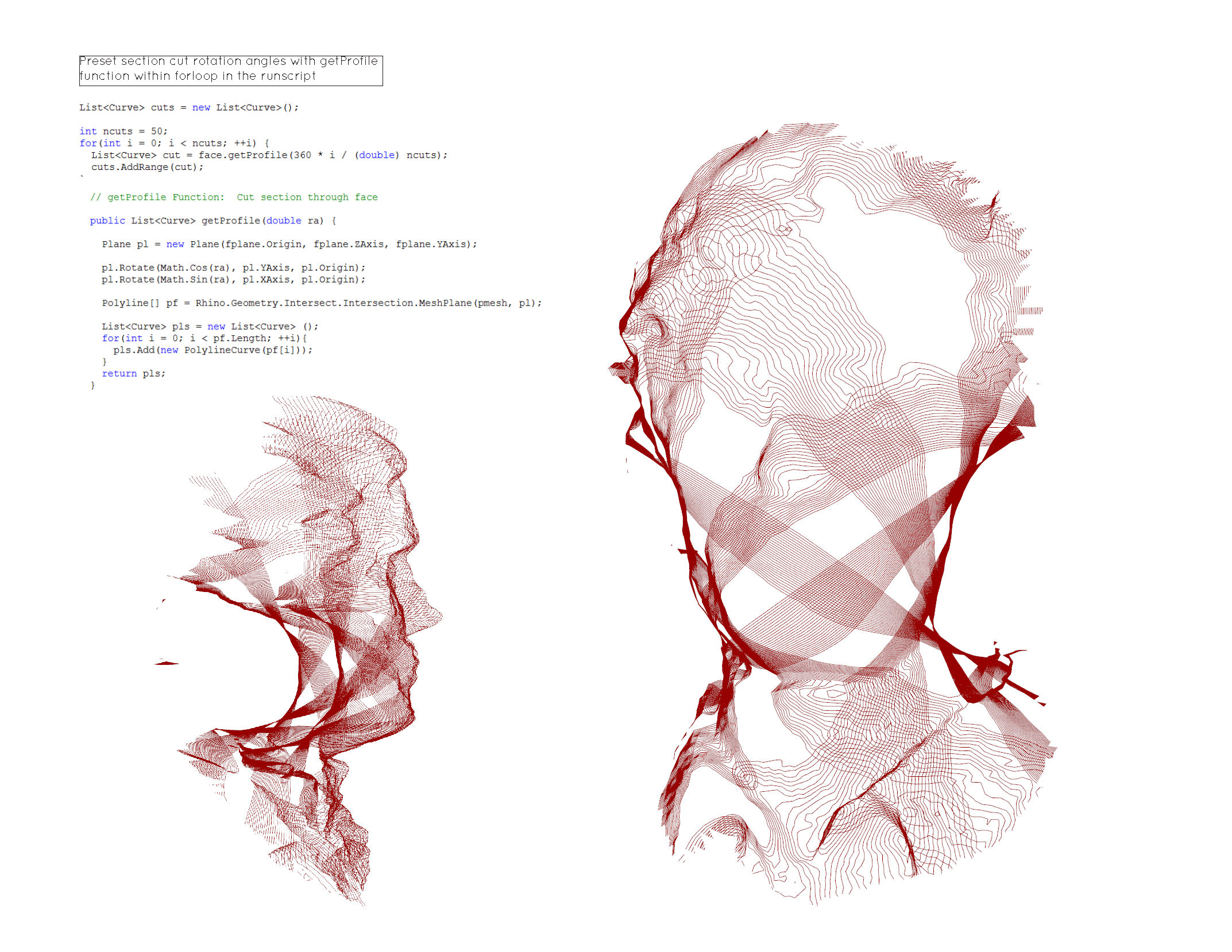
Core Algorithm
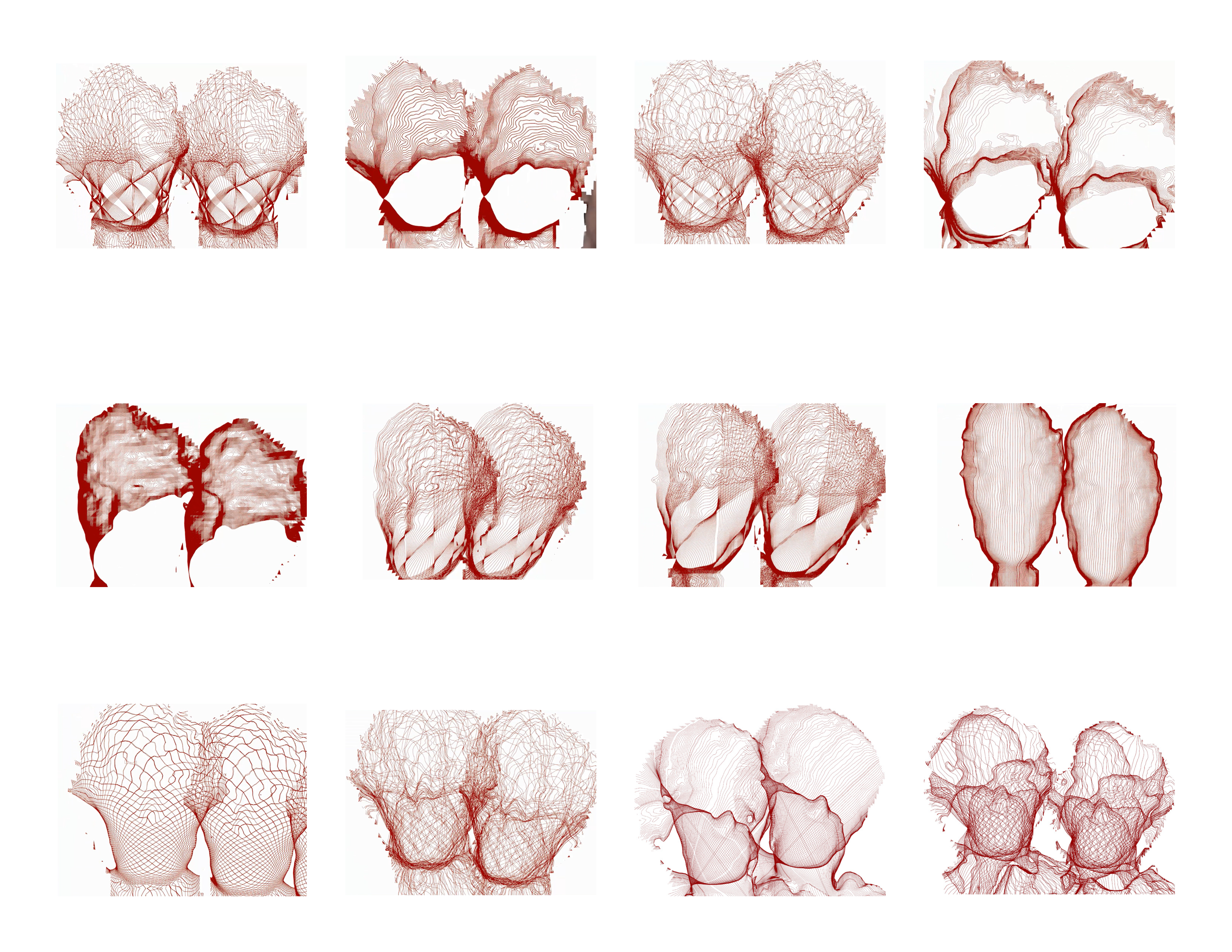
Generated Outputs
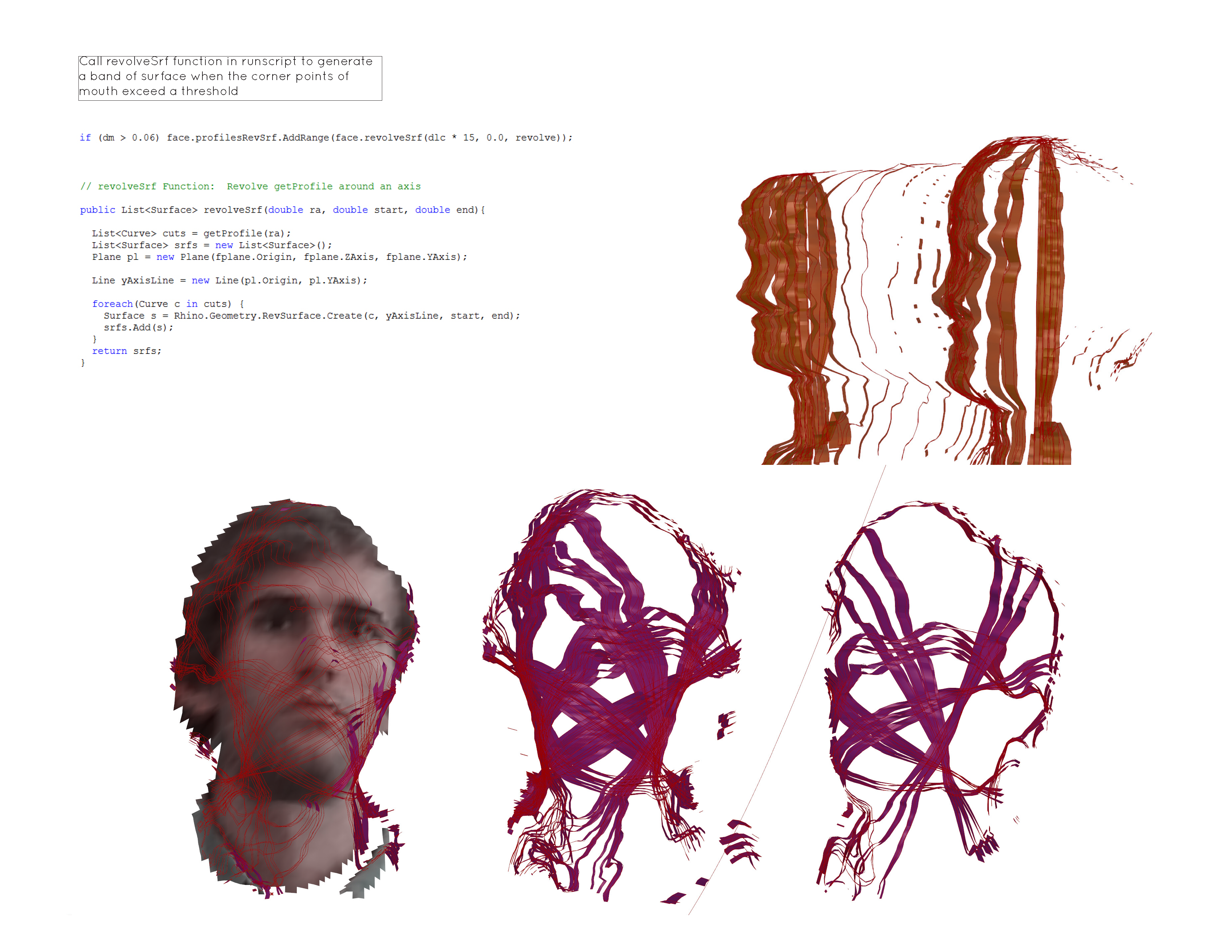
Variety Control with Smile Tracking
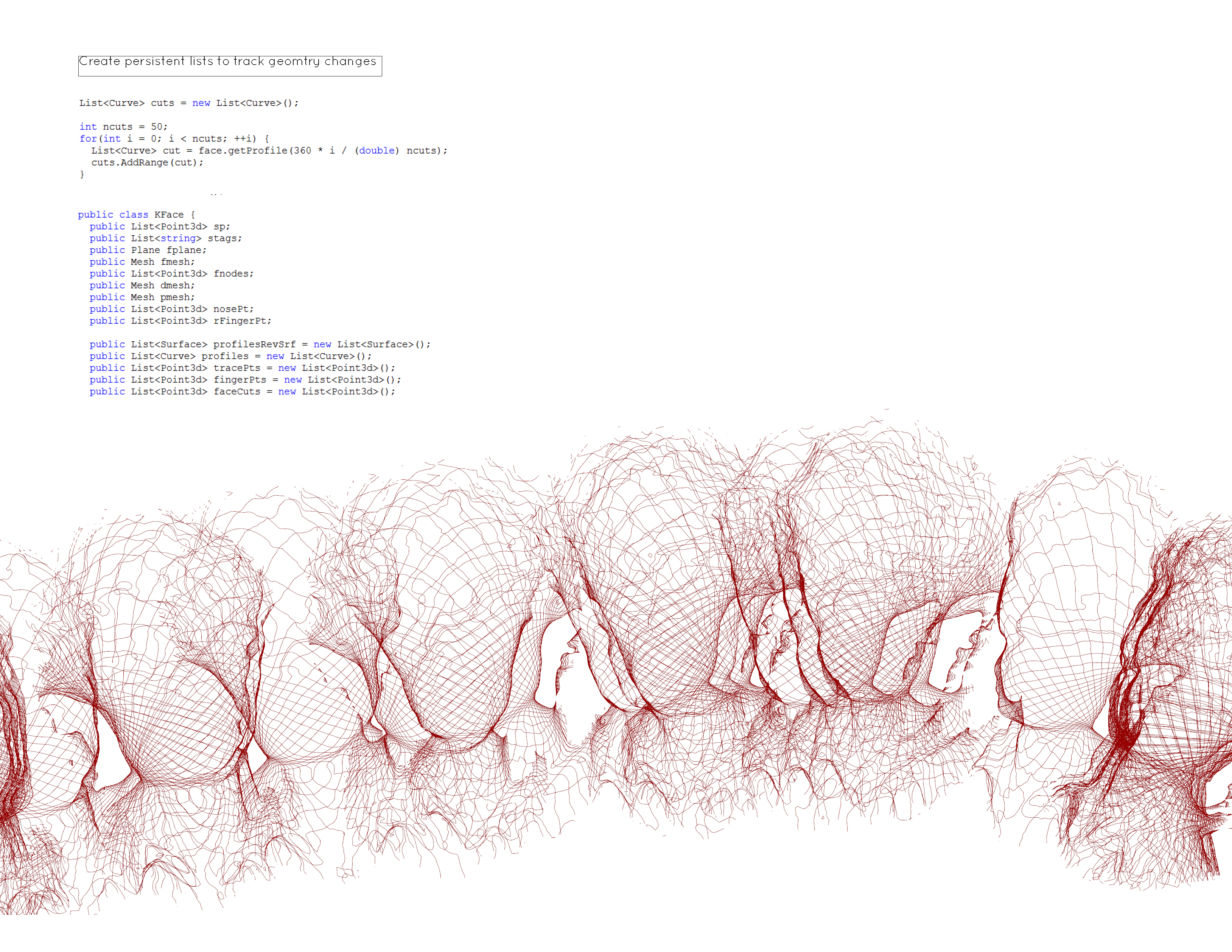
Persistent Lists
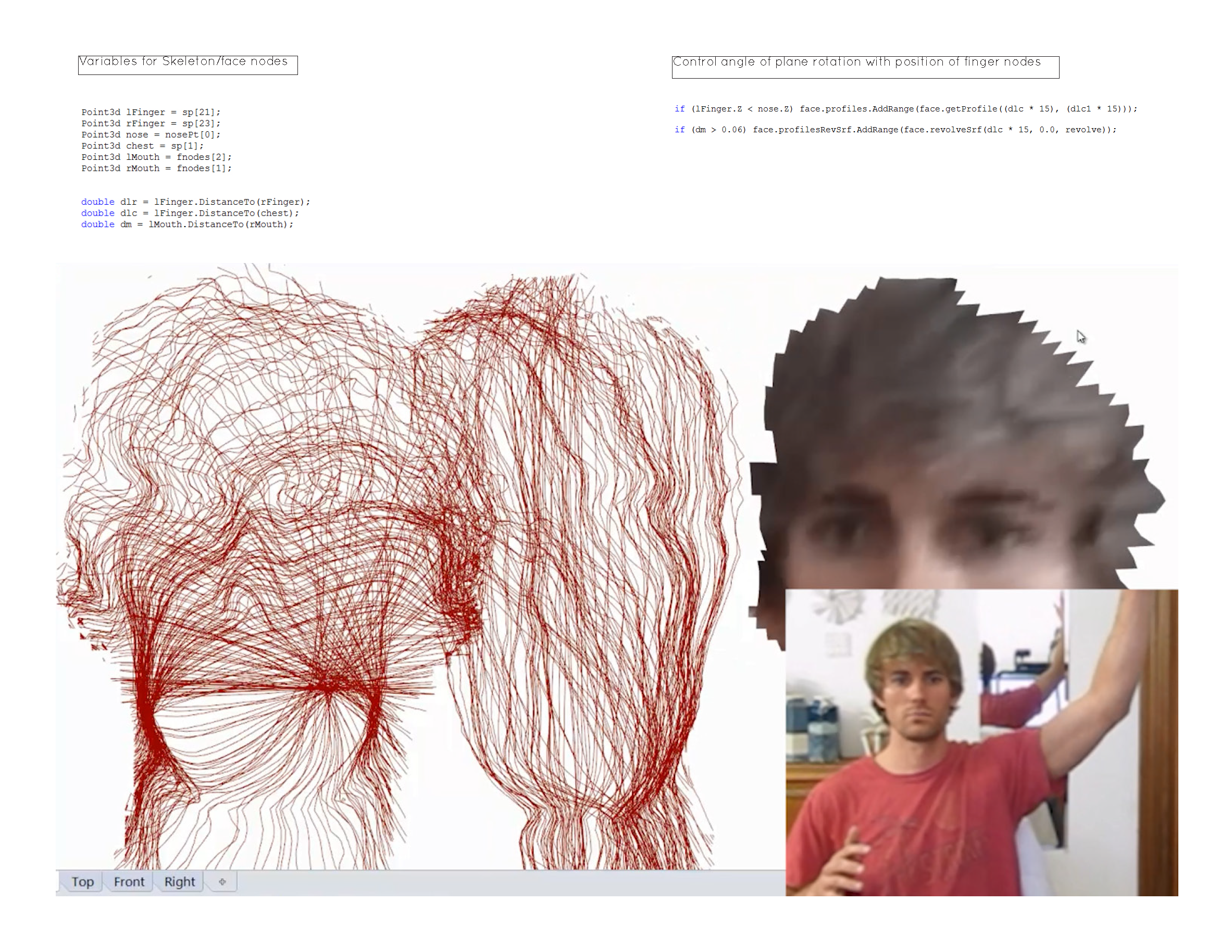
Hand Gesture Control
Computational Design Process
Ceramic Material Research
Professor: Leire Asensio-Villoria
Team: Jacob Hamman, Aziz Barbar, Tiffany Cheng, Adelene Tan
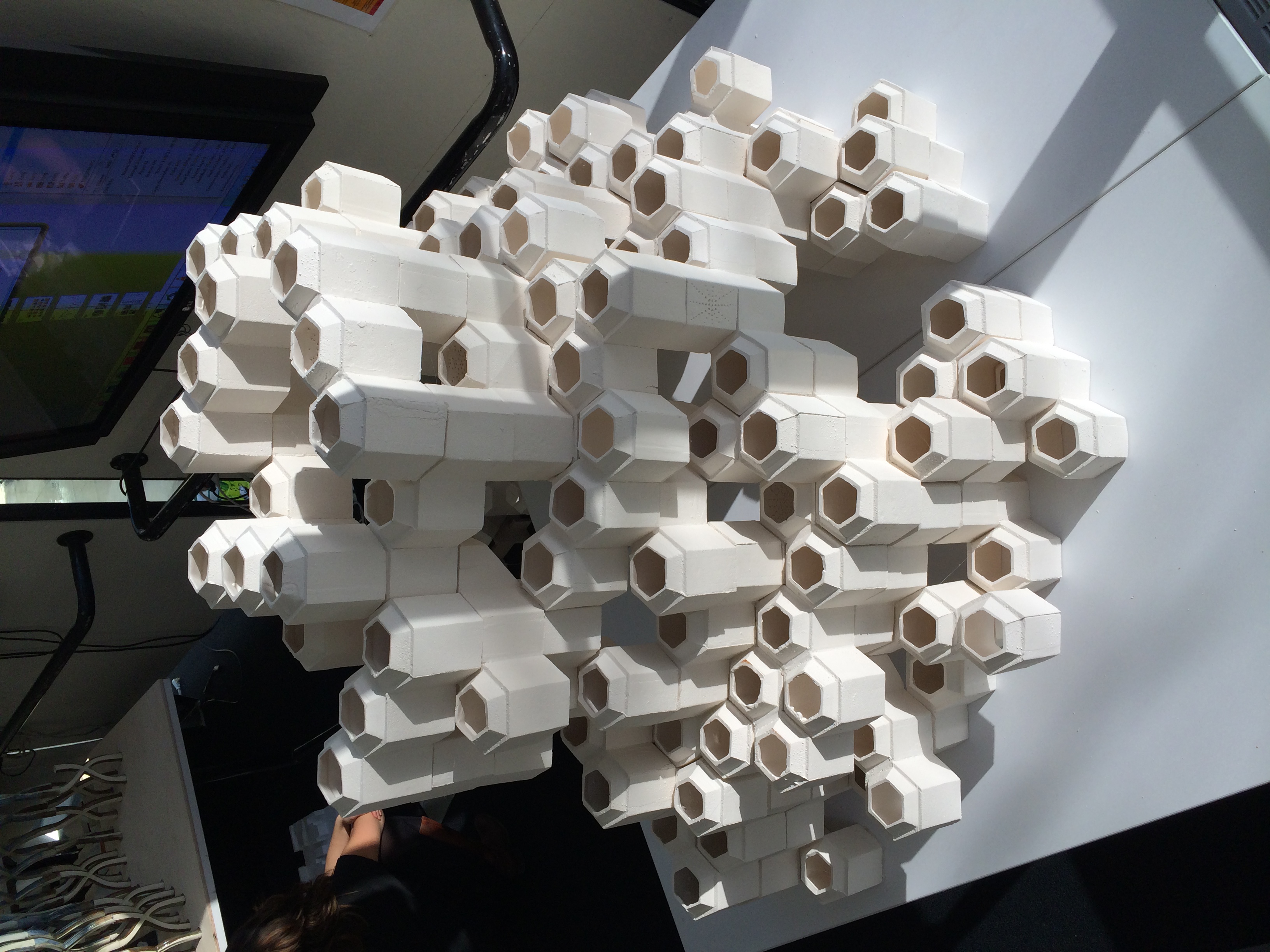
This research explored traditional ceramic techniques combined with contemporary digital fabrication methods, examining material properties,
forming processes, and structural applications. Our team was inspired by traditional Muqarnas, also known as honeycomb or stalactite vaulting which are
unique decorative architectural elements in Islamic art and architecture. We developed a hexagonal building block that was slip-cast with porcelain
then arranged into a stacked semi-dome struture.

Plaster Mold Formwork
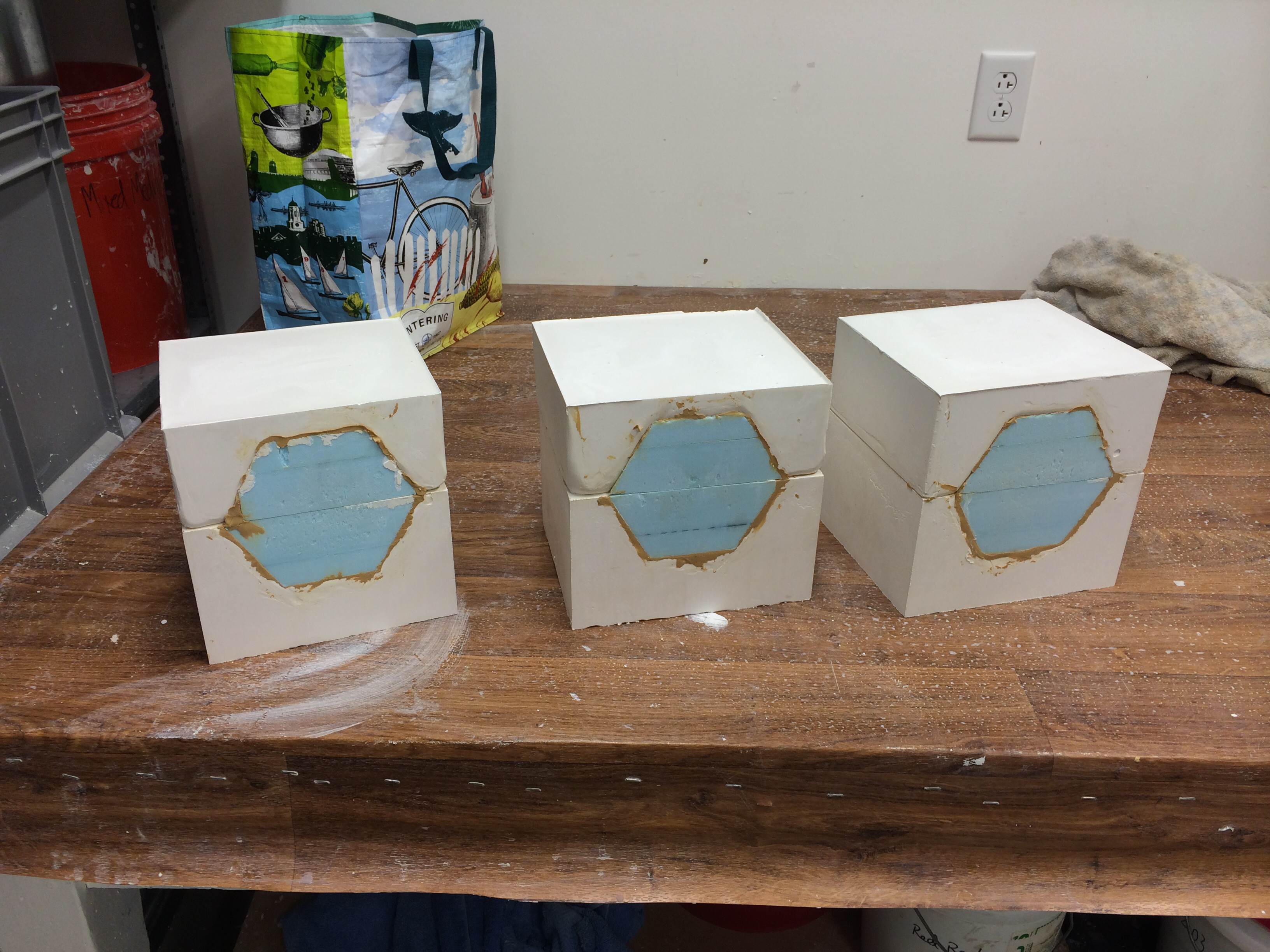
Plaster Mold

Plaster Mold

Bone dry ceramic
robotic alterations
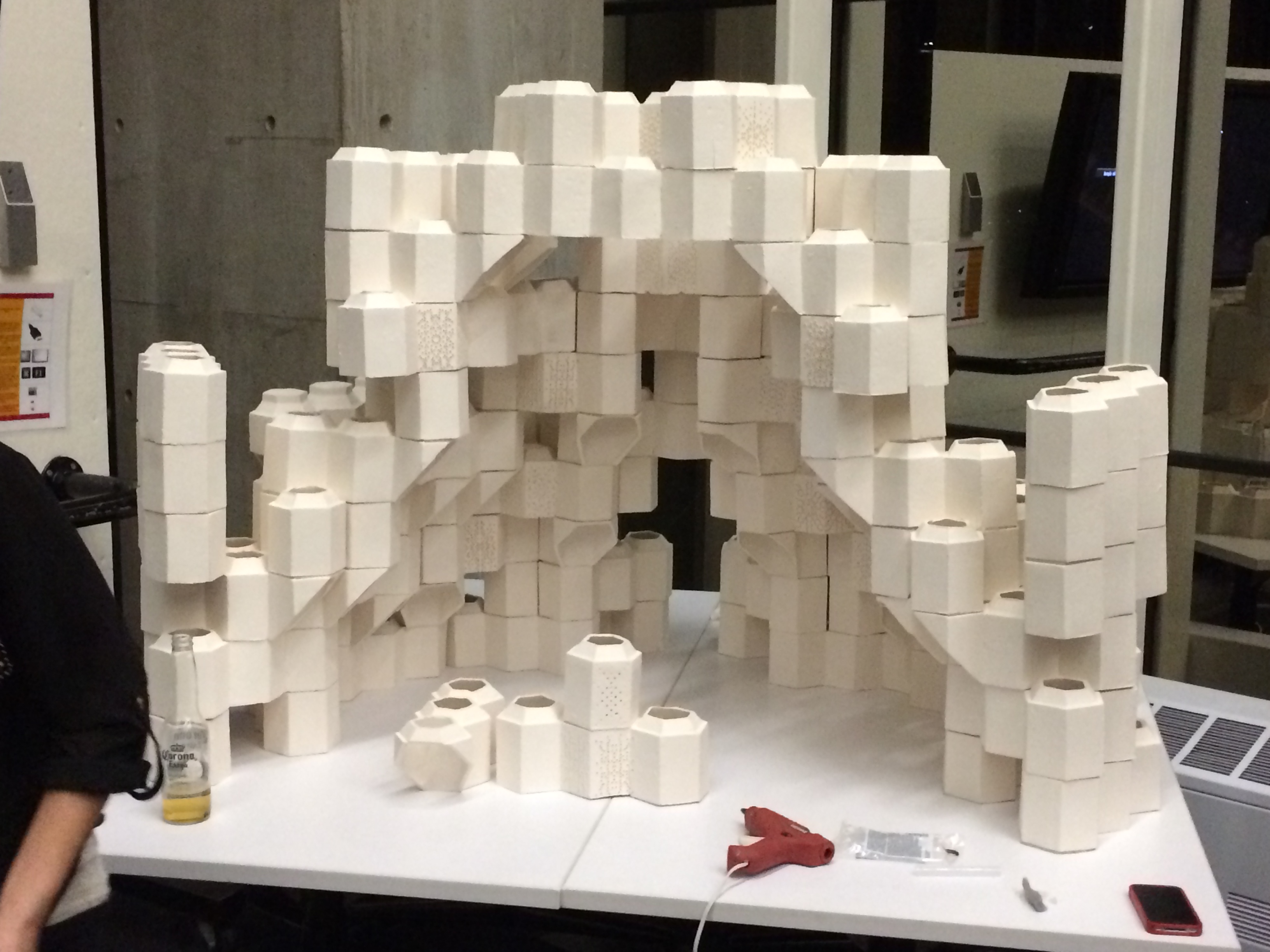
Assembly Process

Final Assembly
Final Assembly
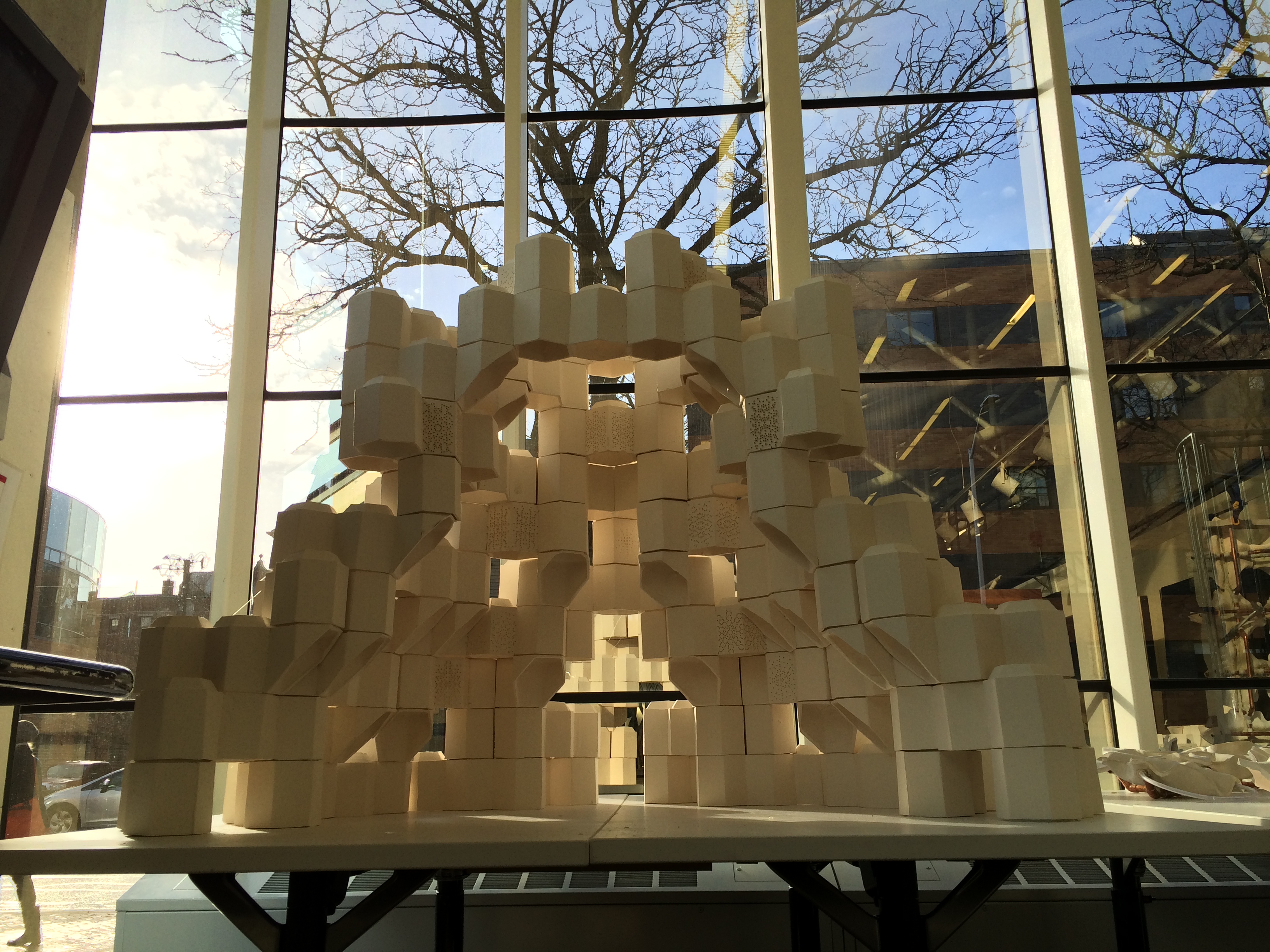
Final Assembly
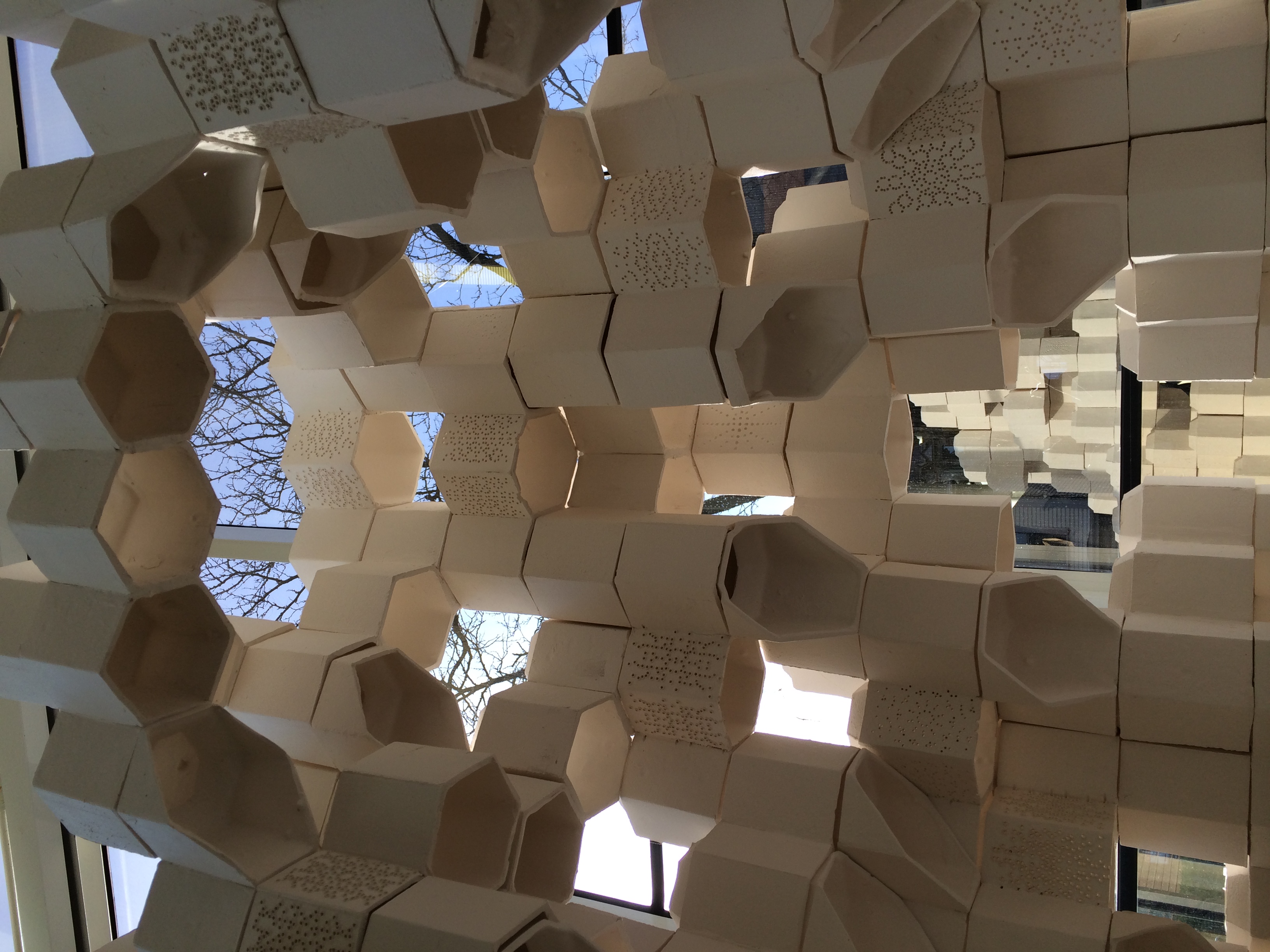
Final Assembly
Structural Surfaces
Professor: Andrew Witt
Team: Jacob Hamman, Quratulain Malick
Research into structural surface systems that combine architectural form with structural performance.
This project explored the potential to use raw timber elements as building components for a flowing geometric pavillion.
Using gathered sticks that were computationally analyzed for curvature and strength, we developed an algorithm that would assign a given stick
to its proper position on the surface of a generated medial surface. The sticks were automatically positioned into a reciprocal frame pattern
along this surface and assigned with assembly identifiers. A scale model was then created to illustrate proof of concept for this architectural system.

Design Inspiration
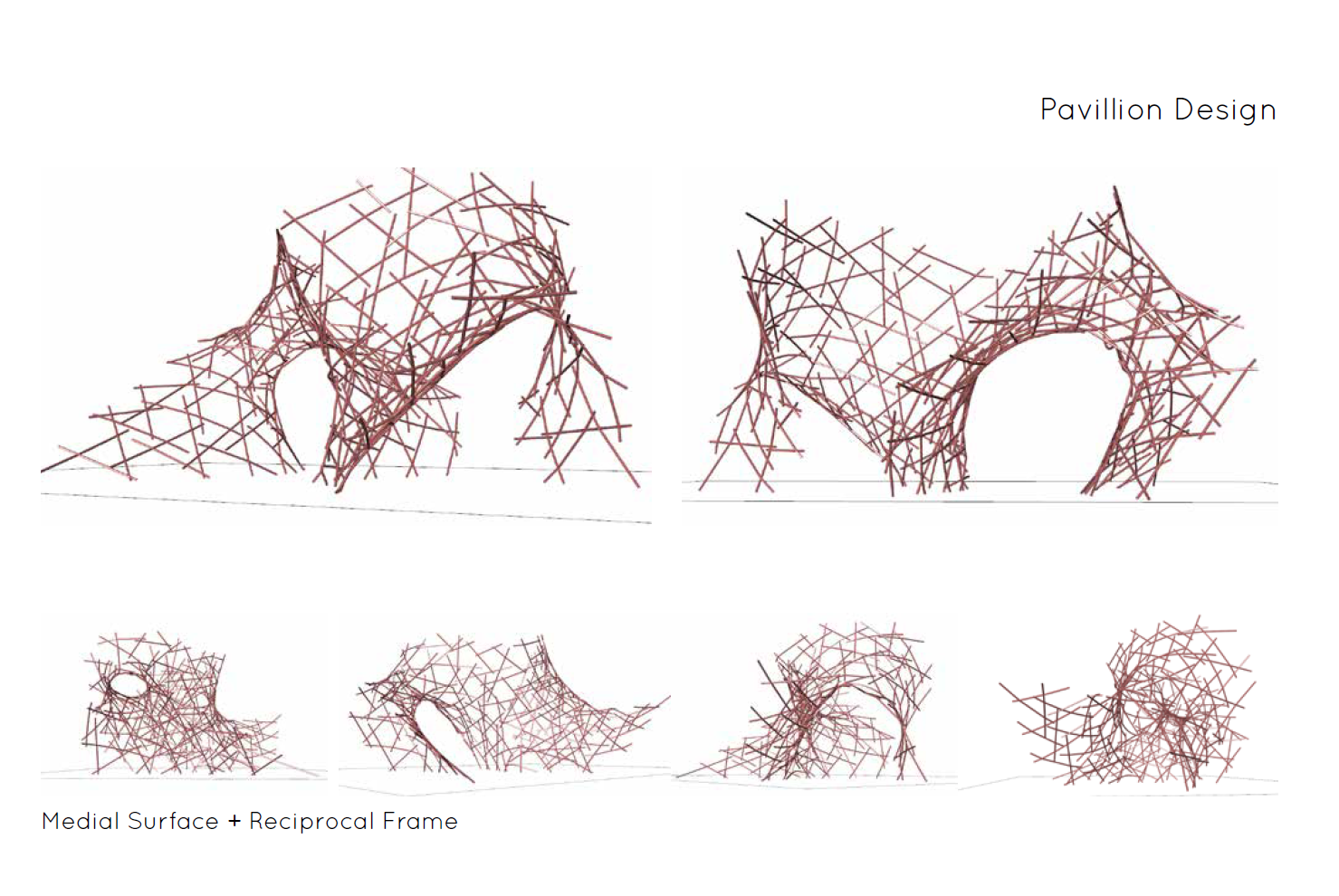
3d Pavillion Design
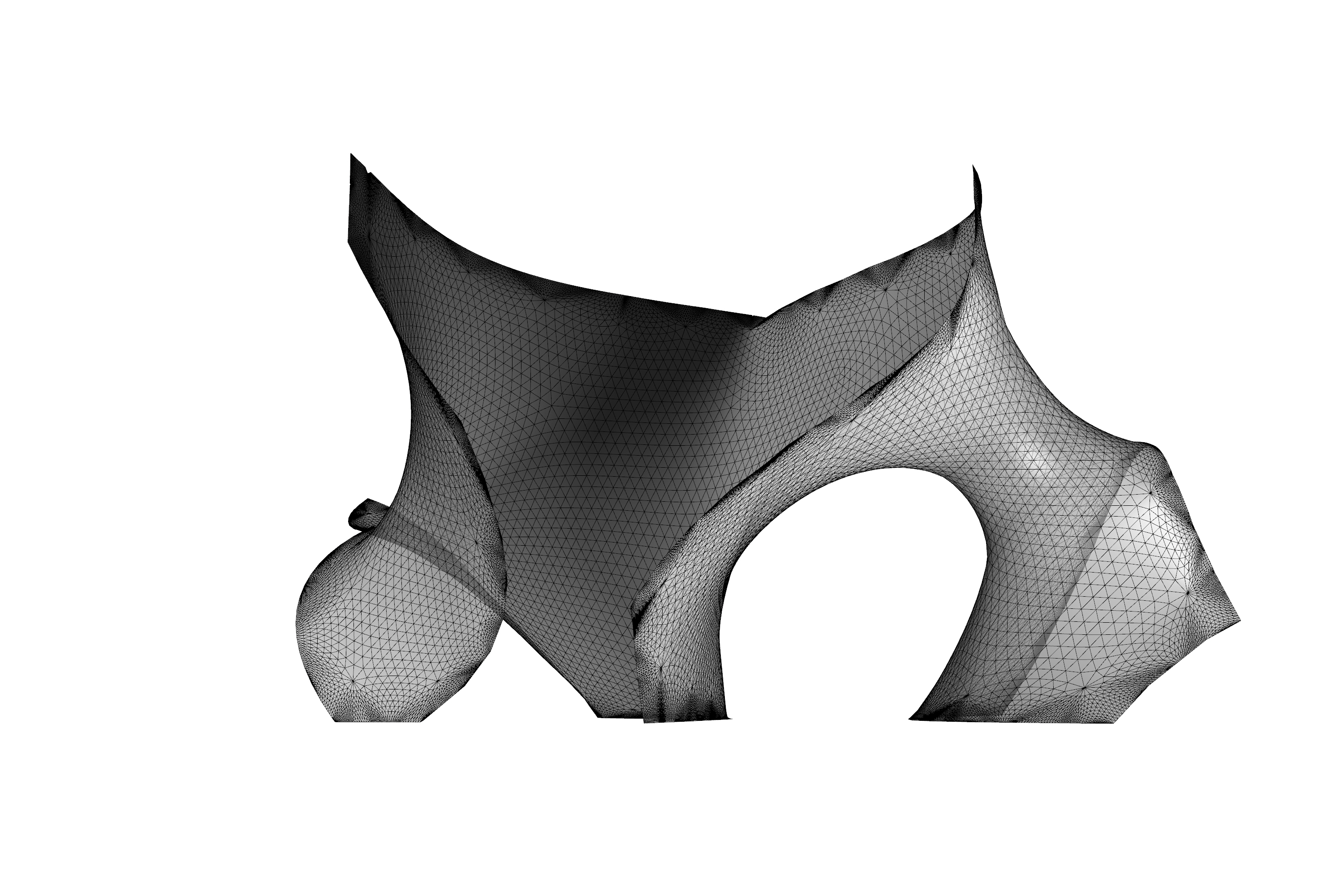
Medial Surface
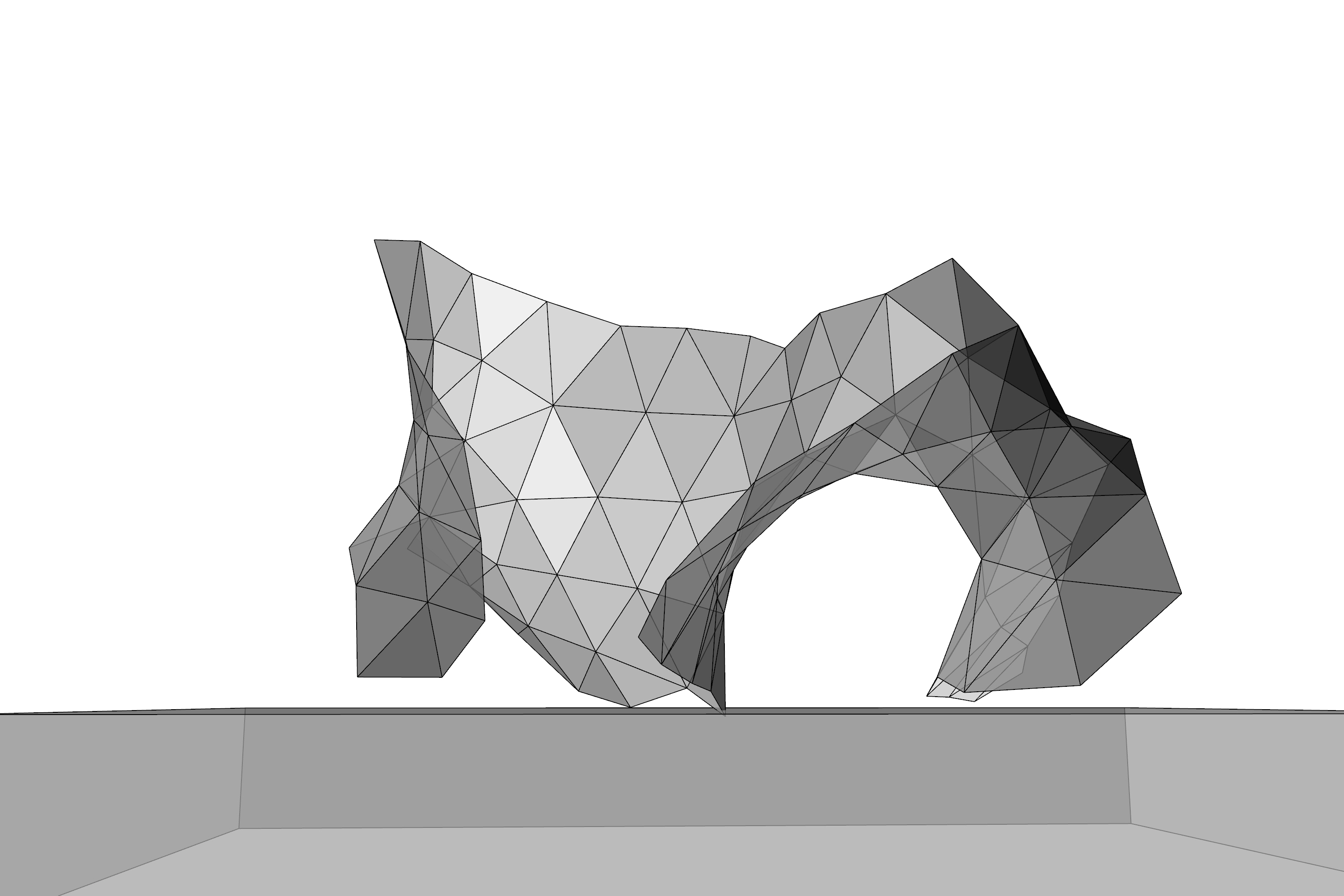
Medial Surface Simplified
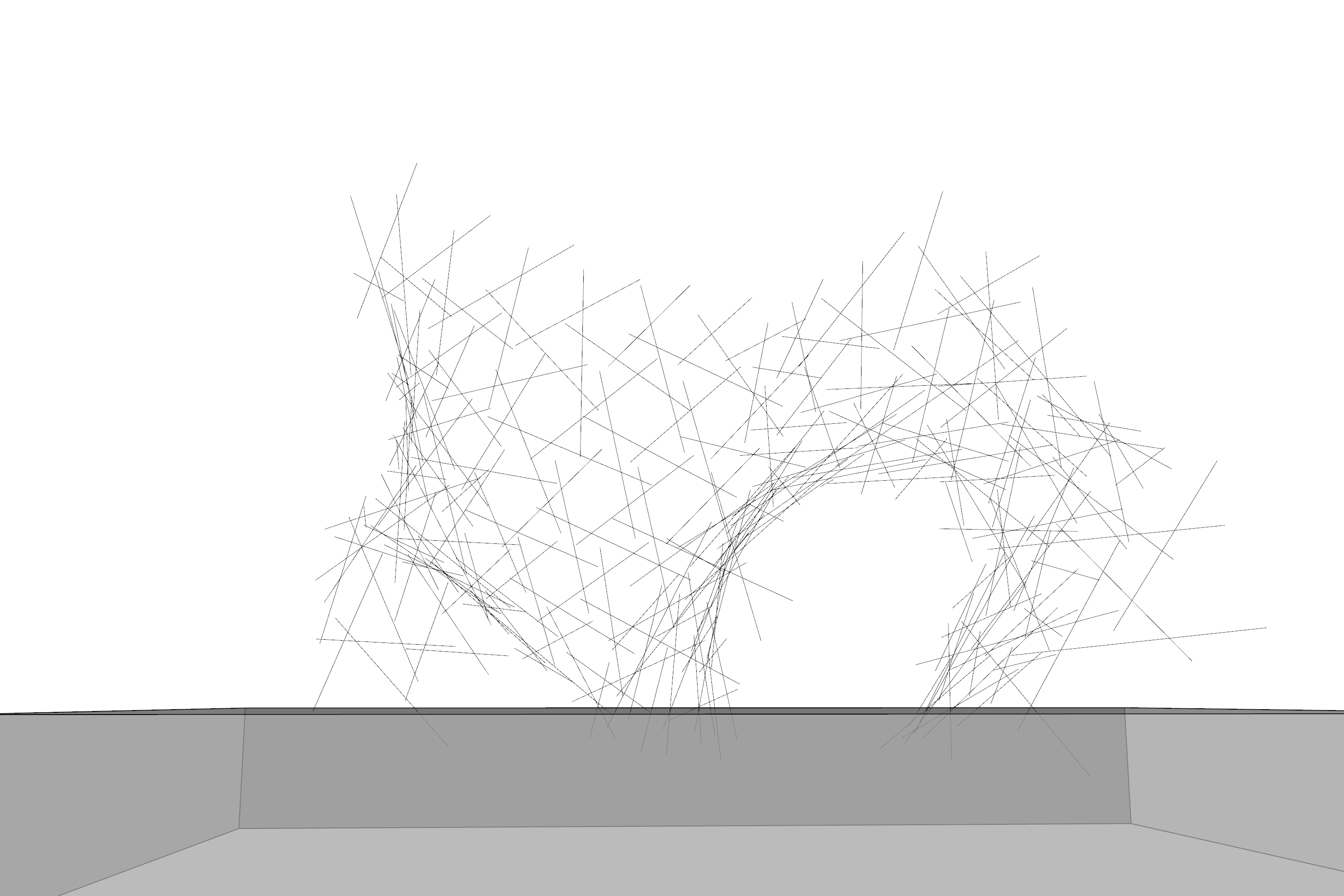
Reciprocal Frame Generation
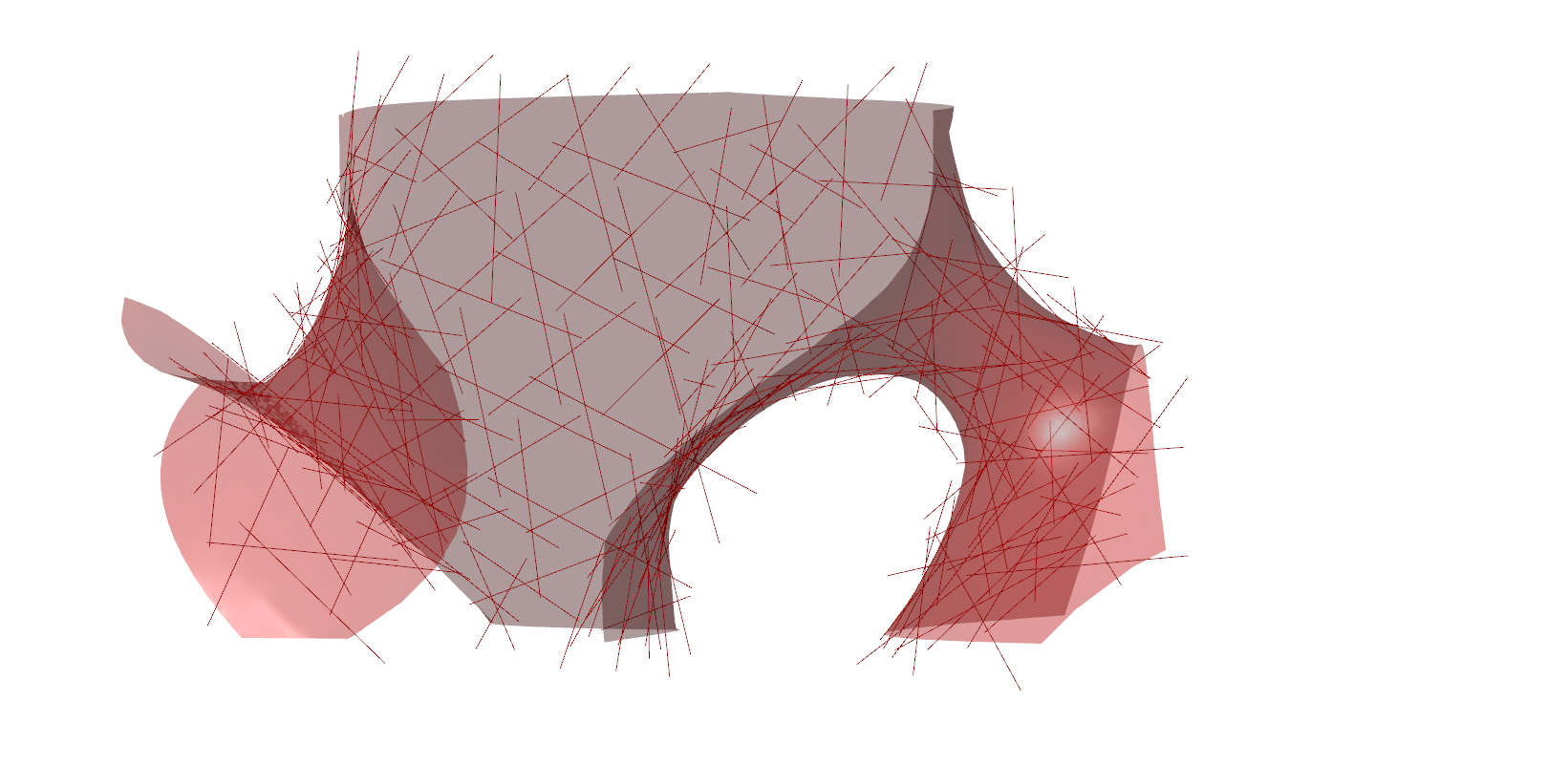
Frame projection to surface

Model Assembly

Model Assembly

Final Assembly

Final Assembly

Final Assembly

Final Assembly
Informal Robotics
Professor: Chuck Hoberman
Team: Jacob Hamman, Spyridon Ampanavos, Chrisoula Kapelonis
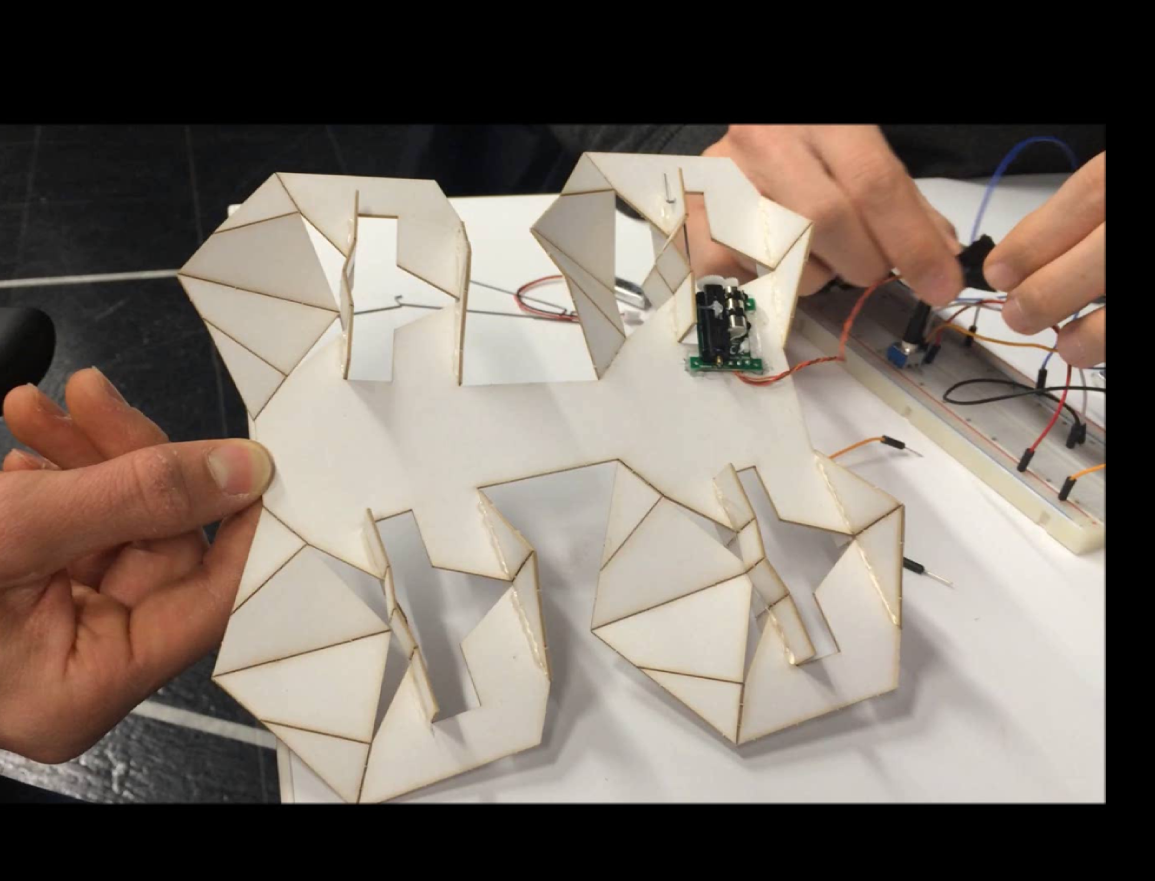
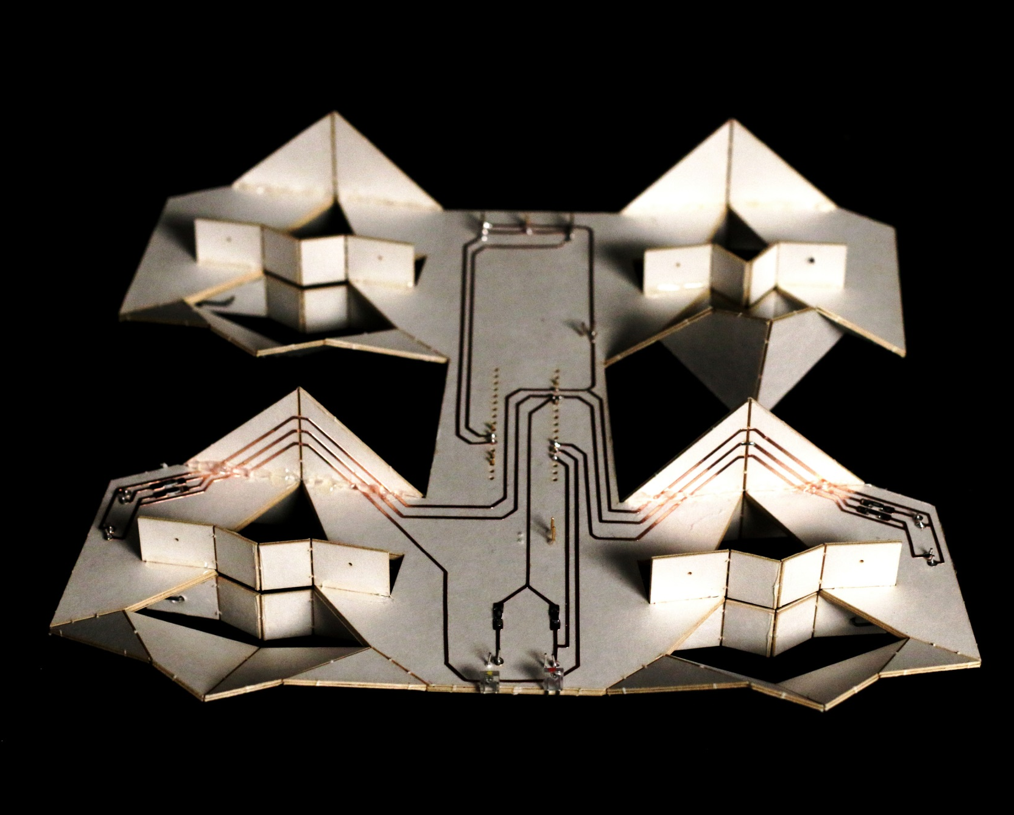
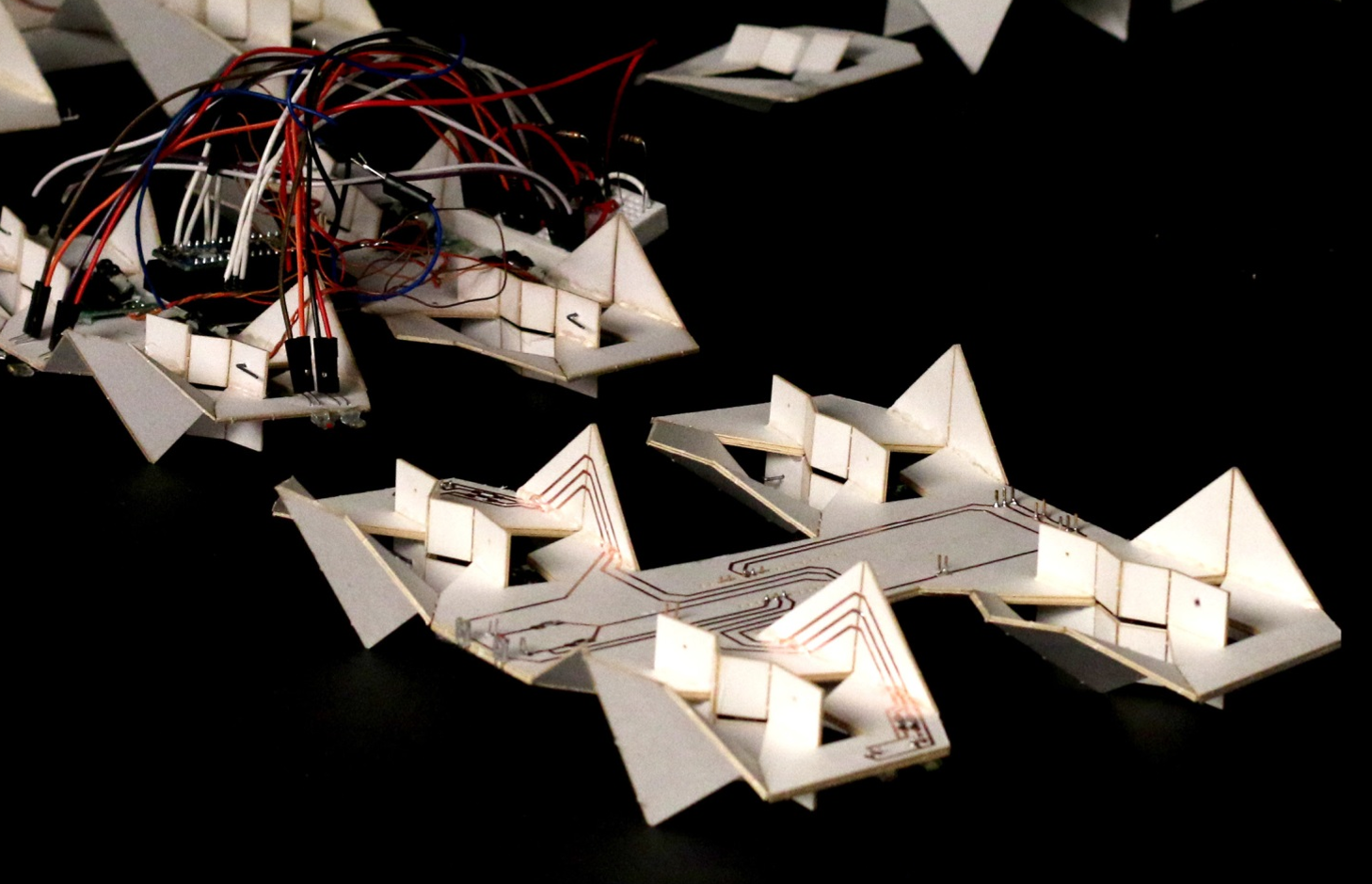
This project involved the design, simulation, wiring, programming, and creation of a robot built from flat laminated materials. We investigated oragami patterns
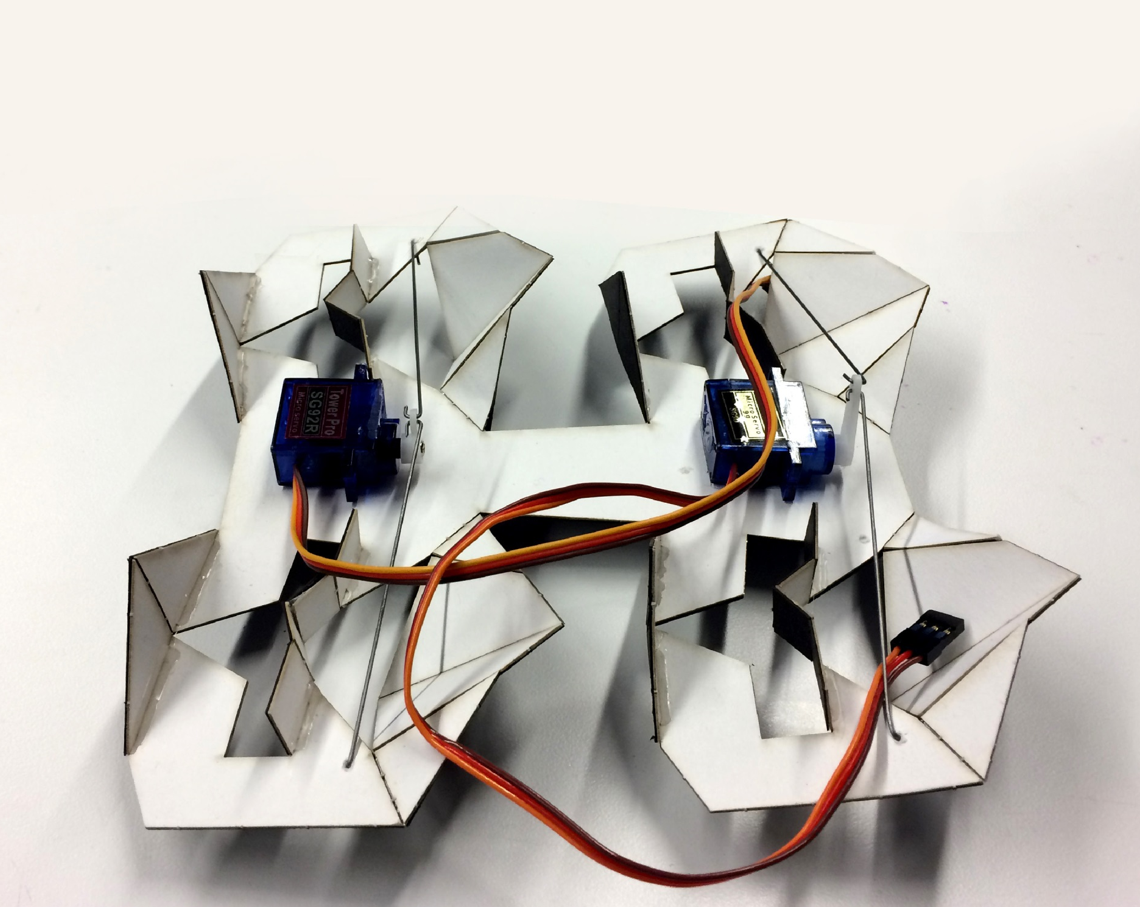
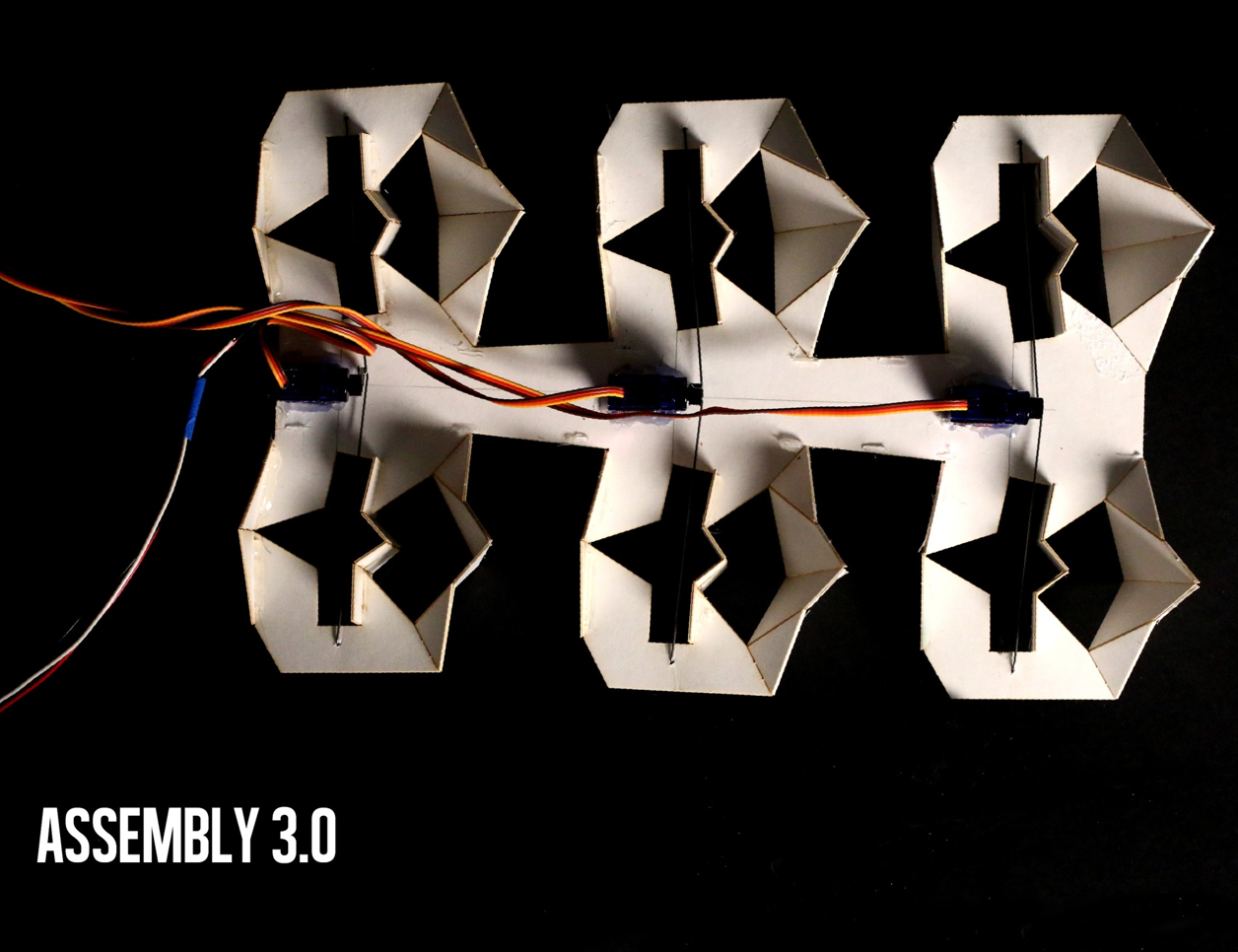
and bio-inspired movement to create kinematics that would allow for forward, reverse, and turning. Using digital fabrication methods, we developed a flexible
laminated material that was powered by micro linear actuators and controlled with a nano arduino microcontroller. Our "F.A.S.T" robot was able to
autonomously identify boundaries and navigate a course.
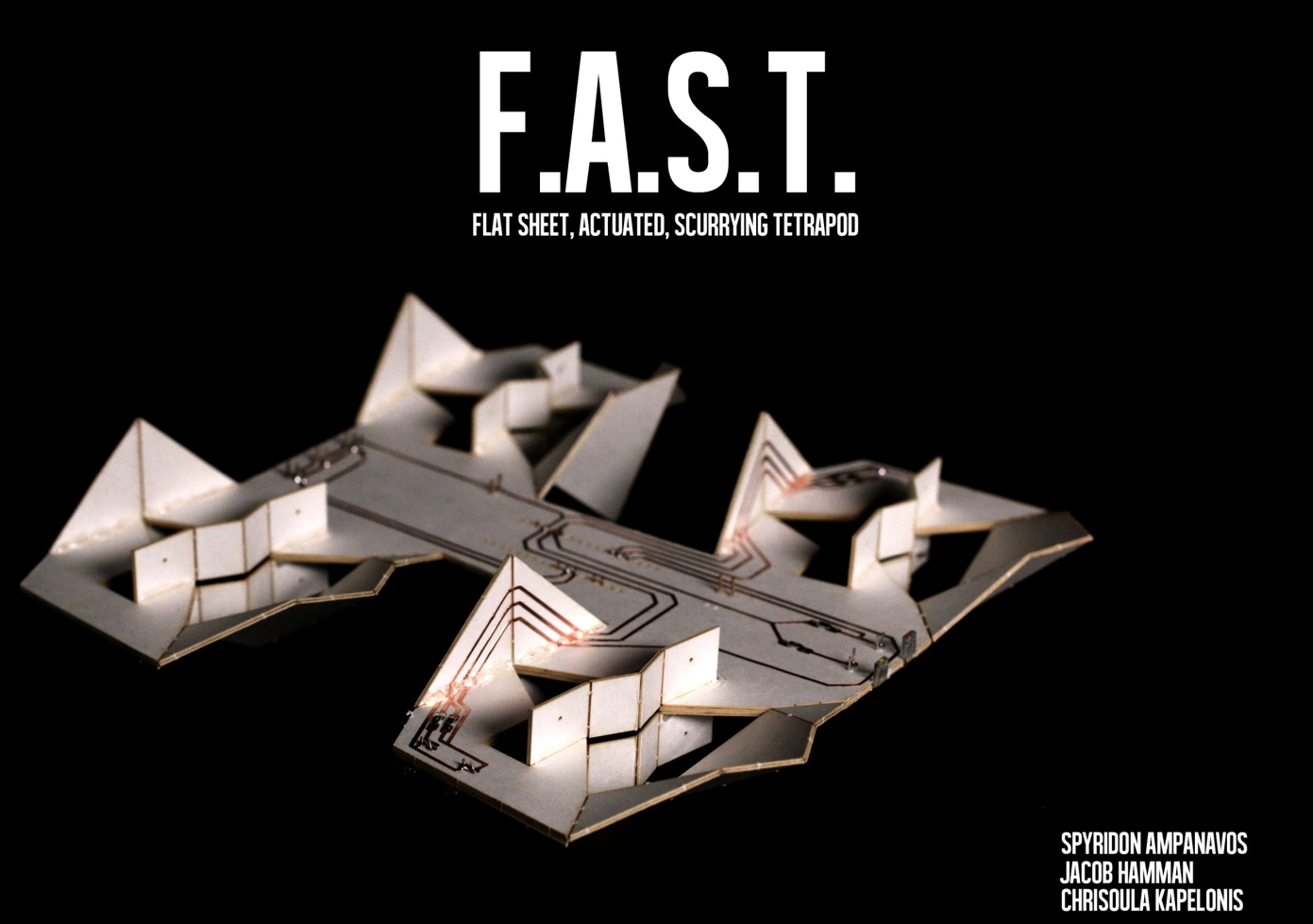
F.A.S.T
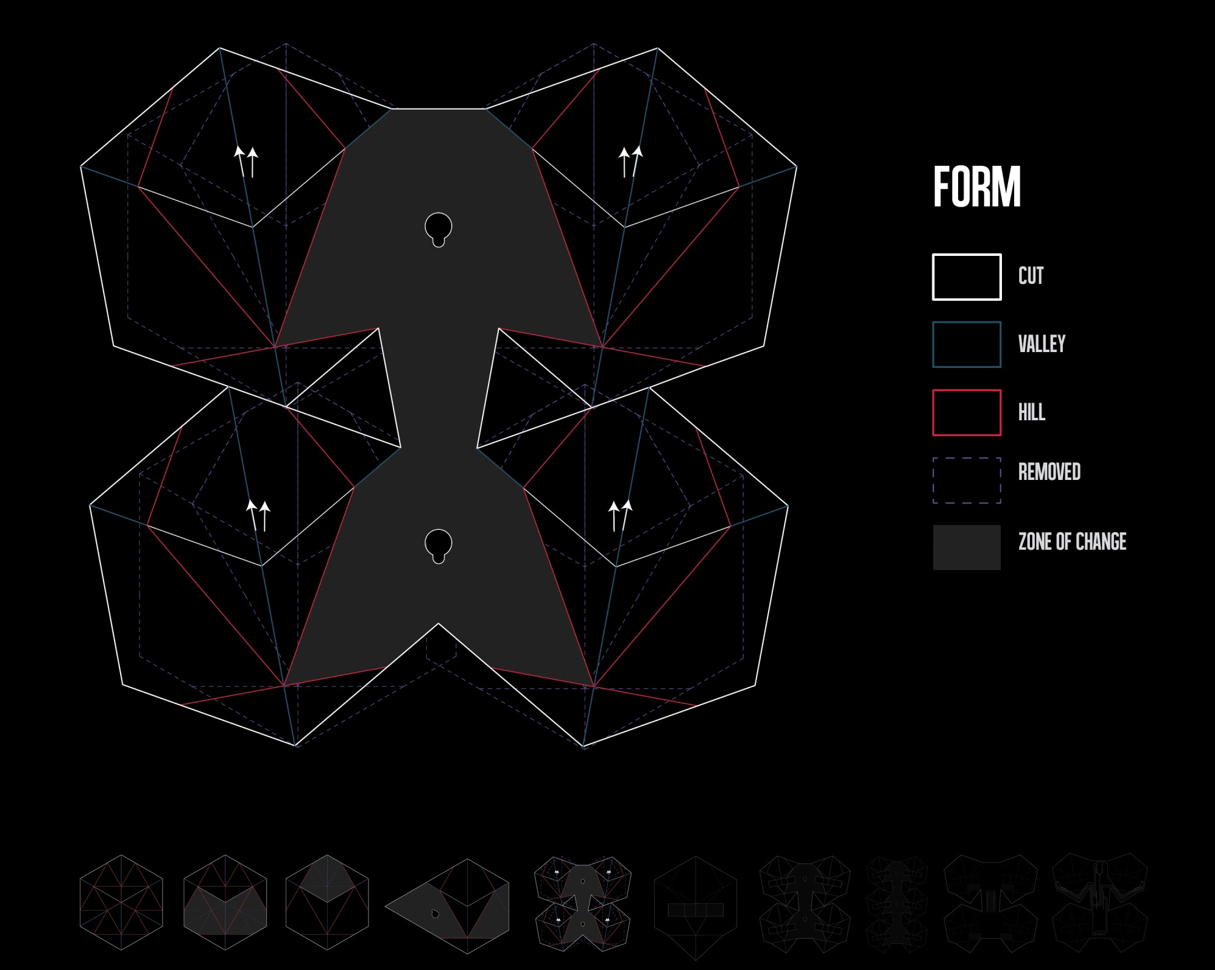
Design Diagram
V2
Actuator Design
V3
Body Design
V4
Body and Actuator
Final Design
With Circuit
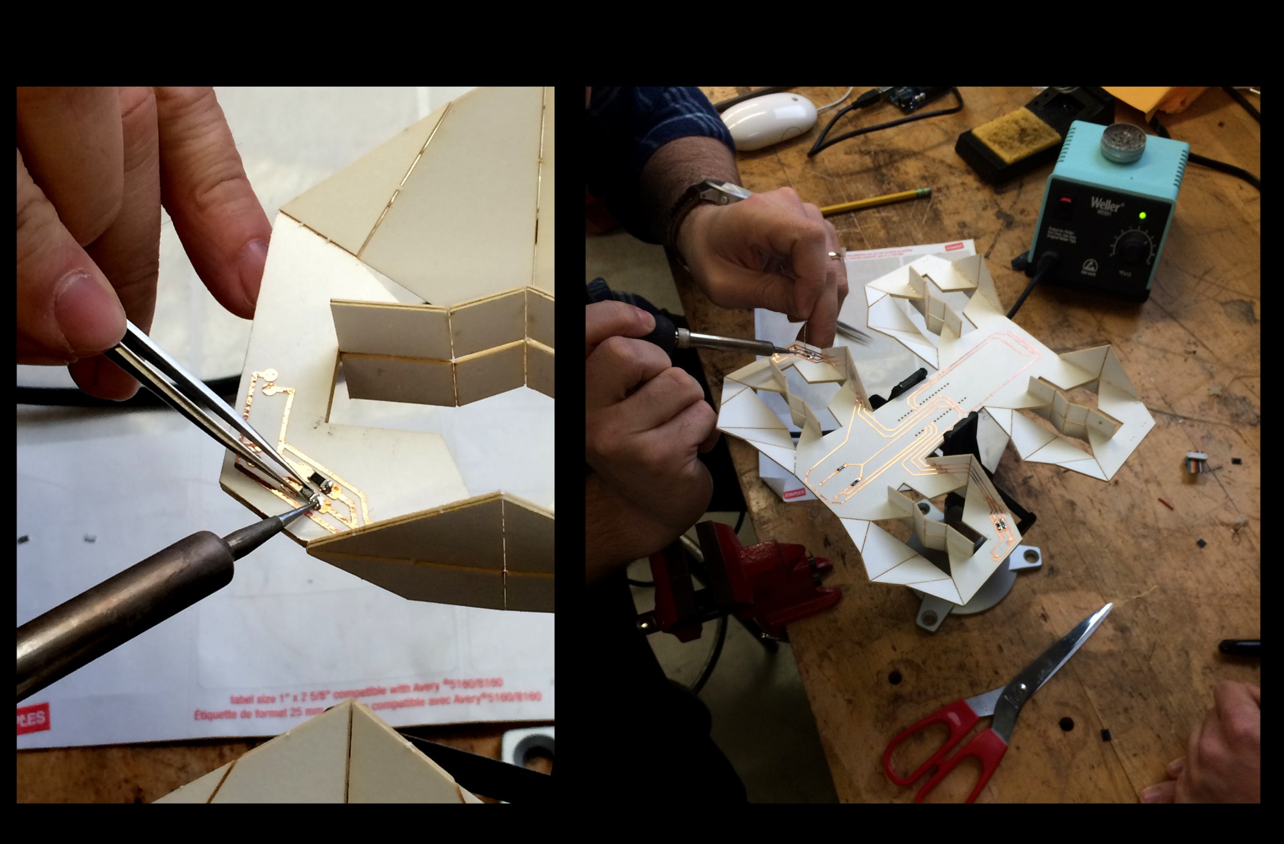
Soldering Components
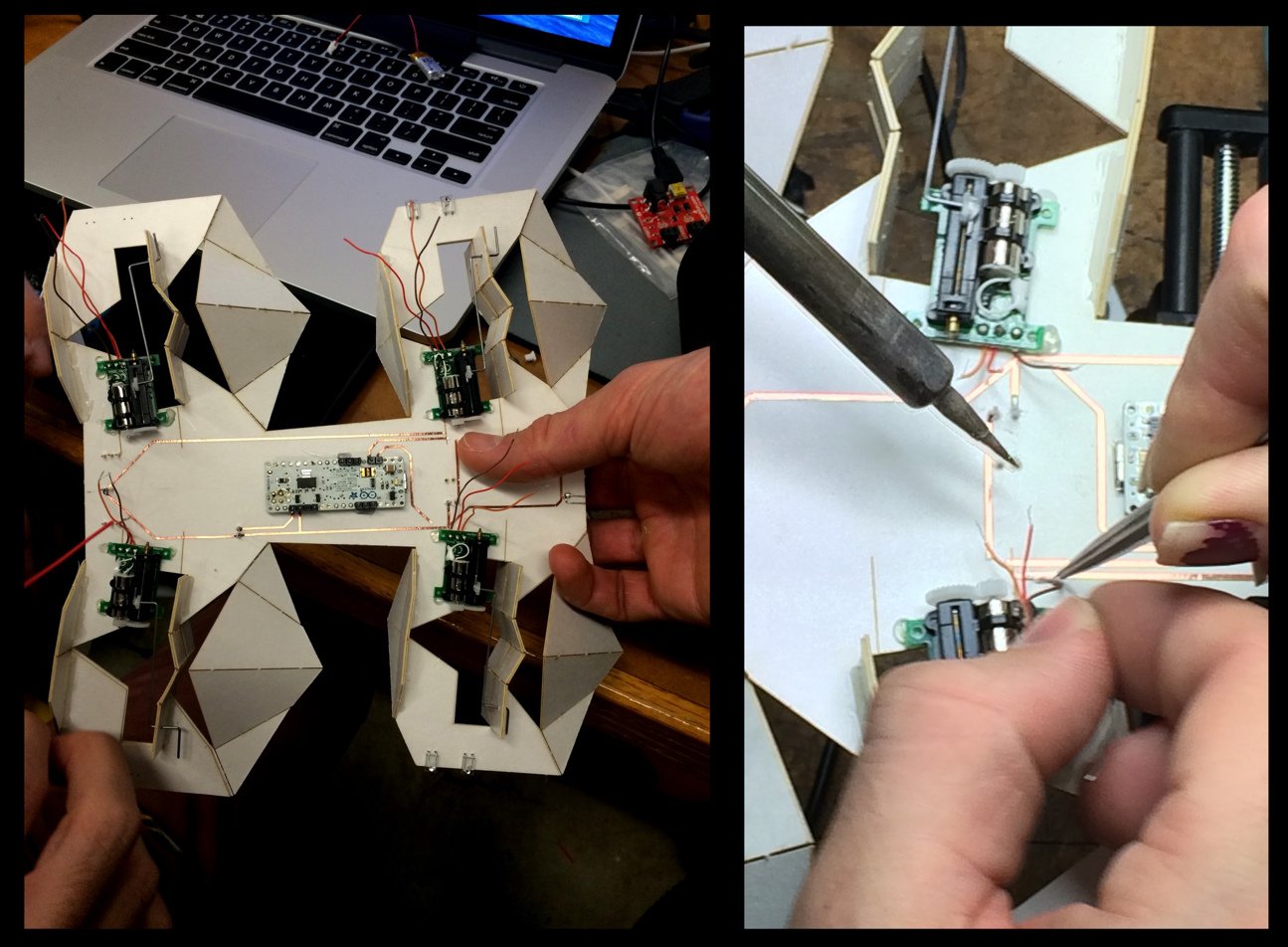
Micro
Linear Actuators
Design Evolution
Movement Demonstrations
Gait Test V1
Gait Test V2
Final Robot Navigation